Portfolio
Project(as an organizer)
メインで関わったプロジェクト
サイエンスルーム(2017~2019)
サイエンスリンク交流会で自分が提案したイベントで、「一見普通の部屋に見えるが、実は科学的な要素が隠されていて、それを参加者に発見してもらう」という企画である。
第1回は、2017年の夏に一般社団法人 世界が憧れるアカデミーさんのイベントで2日間実施。
第2回は、2018年の春にサイエンスリンクフェスタで実施。パンフレットはこちら。
第3回は、2019年の秋に某デジタルコンテンツ制作会社とのコラボ企画が進行。
参考:企画のパンフレット

Space Balloon Project(2019)
風船に観測機器を取り付けて成層圏まで上げ、それを回収して解析するプロジェクト。
国際科学教育協会のもとで全国から集まった子供たちとともに取り組み、宮古島での打ち上げに成功した。
自分は無線通信実験や、観測機器製作チームのメンターを担当した。
参考:webサイト
参考:リポジトリ

Biwako Environment Project(2020)
小・中・高校生が作成した観測機を琵琶湖に注ぐ川の河口から放流し、GPSデータ等を取得・分析するプロジェクト。
全国から23機がエントリーし、和邇川から放流・カヌーで回収した。
自分は全体のメンターを担当した。
参考:webサイト
参考:リポジトリ

e-kagaku Satellite Project(2021)
CubeSatと呼ばれる超小型衛星を小中高生で作り、ISSから放出するプロジェクト。
機体製作に加えて無線手続きや安全審査等を進め、三井物産エアロスペースやJAXA協力のもと2024年に打ち上げる。
自分は初年度のプロジェクトリーダーを担当した。
参考:webサイト
参考:動画

Data Analysis Workshop for pre-university students(2022)
MathWorksから公開されている、宇宙に関するデータ解析ワークショップの教材。
学生時代に開発に関わり、MATLAB未経験の学生でも取り組めることを目指した。
参考:webサイト
参考:Github版
中央公園文化センター 子ども講座「東大生と科学実験!」(2016,2017)
東京都北区にある中央公園文化センターにて、「粉と粒のふしぎを楽しく学ぼう」「「ゆれる」のふしぎを探ろう」「親子で学ぶ電気のふしぎ」と題して3回にわたりイベントを実施した。
当時所属していたサークル東大CASTでは、様々な実験教室やサイエンスショーを行った。その中で自分がリーダーを務めたものの1つがこのイベントであり、学校の範囲を超えた最近の話題を取り入れたり手を動かすことで科学を実感してもらったりした。

宇宙サークルAgora(2018)
宇宙やプログラミング、教育に興味のある学生を対象にサークルを立ち上げ、運営や新歓などを行った。京都と東京を中心に勉強会や宇宙をテーマにしたプロジェクトを実施した。
副代表を担当。
機械系アドベントカレンダー(2018)
Qiitaのアドベントカレンダーをやってみたかったので、学科の人間に呼びかけ企画した。自分は「型で覚えるDeep Learningのライブラリ」と題した記事を書いた。たまにROSとかの記事も書いてます。
参考:機械系アドベント2018
卒論タイマー(2019)
ただの悪ふざけで作ったカウントダウンタイマーだが、学科の同期たちが面白がってコミット・拡散したためにオープンソースプロジェクトみたいになった。
参考:当時のページ
参考:リポジトリ(forkして締め切り日時を変えてお使いください。)
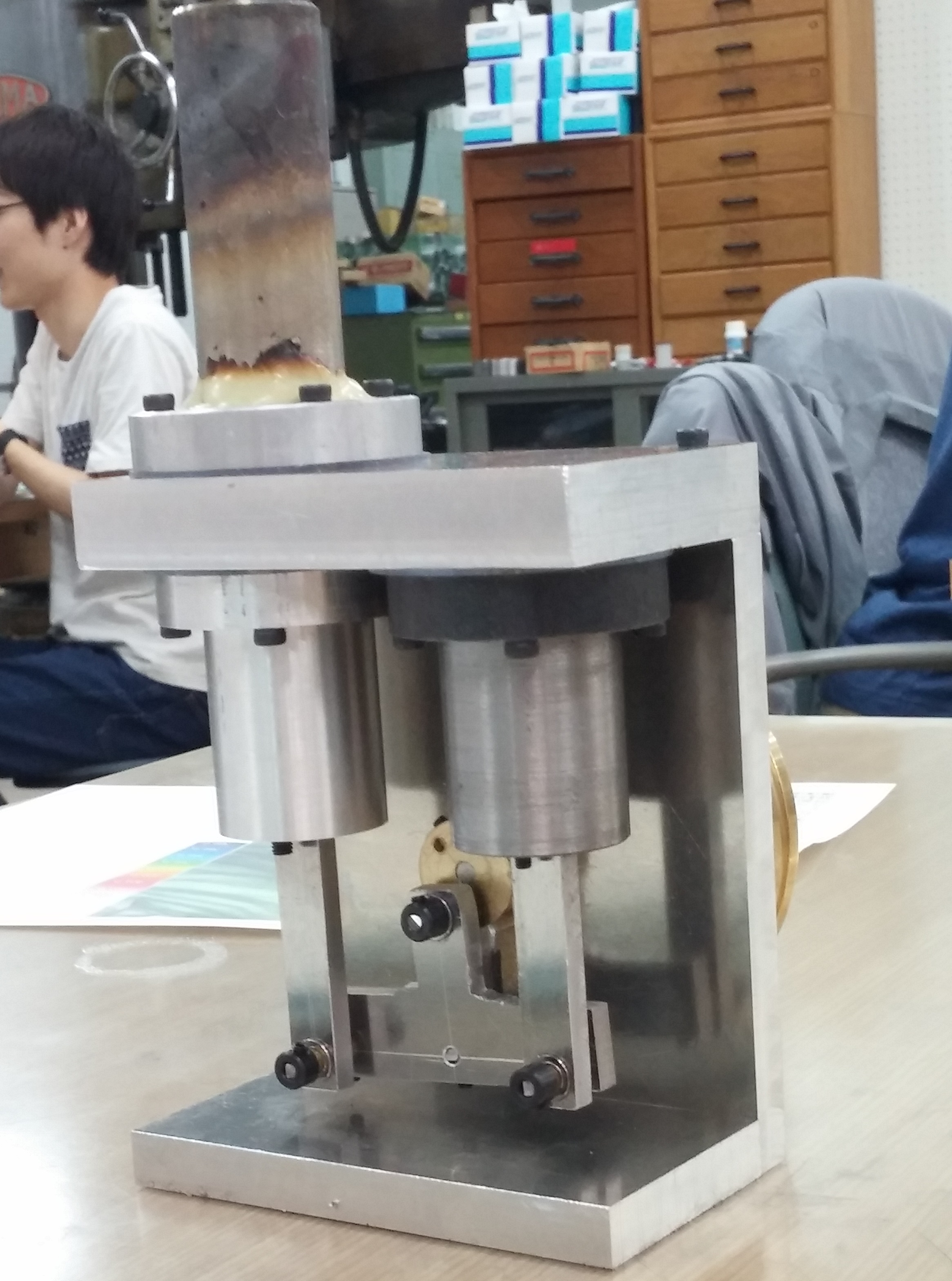
スターリングエンジン(2017)
大学の演習で製作。高さ20㎝程度の小型なタイプを設計。
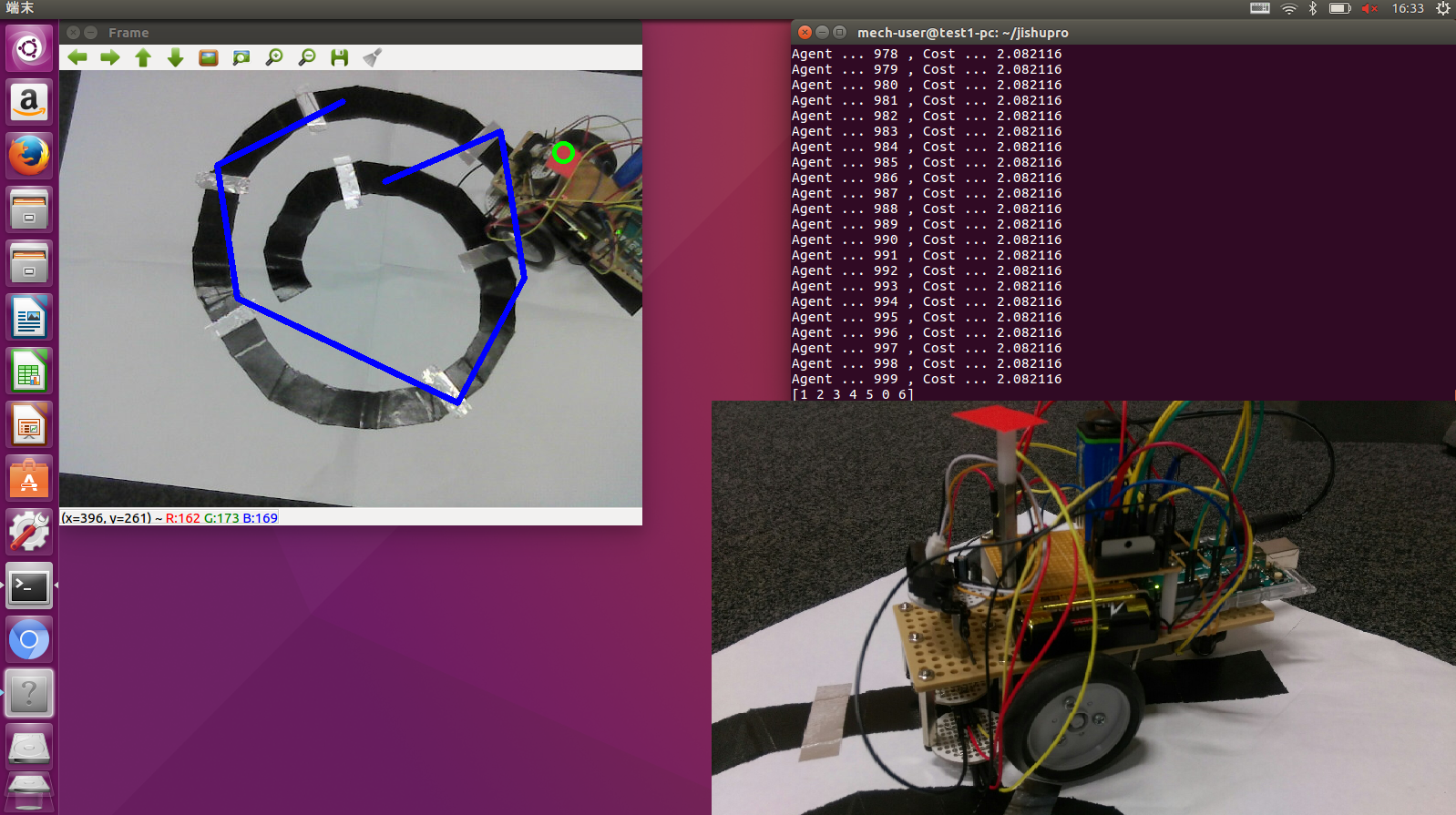
最短経路探索ロボット(2017)
大学の自主プロジェクトで製作。ラインに沿ってロボットを走らせ、カメラによる色認識で銀テープの位置を把握し、アリコロニー最適化で巡回セールスマン問題を解くことで、銀テープのポイントを全て通る最短経路を求める。ロボットにはArduinoを用い、光センサーやモーターを取り付けた。
水上ロボット(2019)
水中ドローンに興味を持ちArduinoとタミヤの水中モーターで製作。http://edurov-mark3.com/を参考にして、二種混合の瞬間接着剤で接続部の穴埋めをした。Arduinoとその電源、シールド基板、モーターの電源は全てタッパー内に収めており、水中モーター内につながる導線だけがタッパーの外に出ている。

四足歩行ロボット(2019)
Arduino Megaとマイクロサーボモータで製作。各脚3つずつサーボモータを使っており、胴体は1mmのアルミ板を加工して作った。外部電源をつないでいるが、それも含めて自立し、歩行可能。

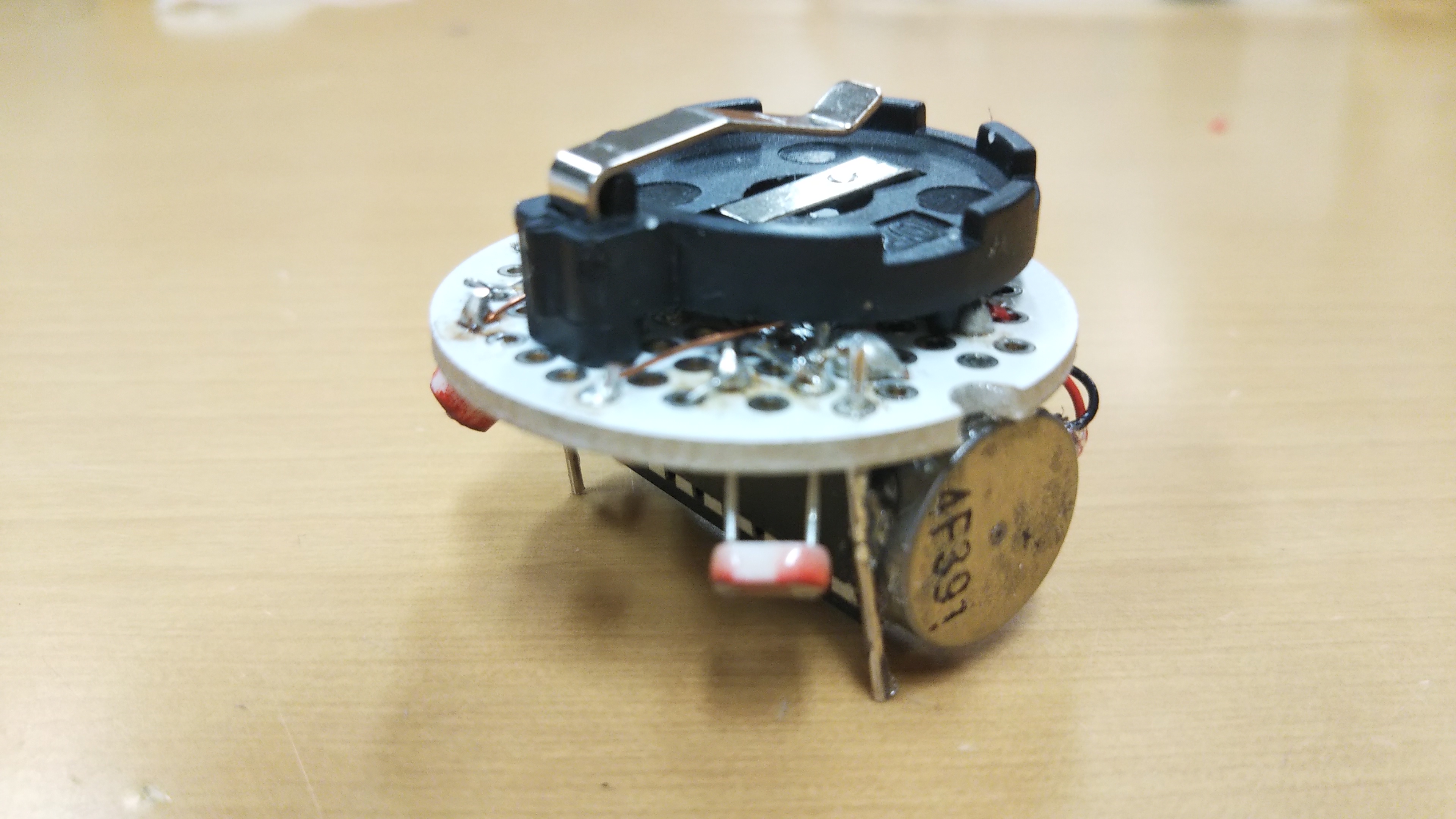
PIC小型ロボット(2019)
PICの勉強がてら製作。ハーバードの群ロボットの論文で有名なKilobotsを意識した。ボタン電池で駆動することを期待したが、電流不足のため実は単3電池4本とつなぐ必要がある。CdS2つと振動モータ2つがついており、明るい方に移動する。
RoomAgora(2022)
Webページ上で自分の作品を展示するためのサービス。バーチャル空間の手軽さや自由さによって、インタラクティブで発見的、または予想だにしない展示の誕生を期待している。
参考:Webページ
Project(as a member)
メンバーとして参加したプロジェクト
Science Study Tour to Adelaide(2012)
高校1年生の時、当時の小石川がCORE SSH校に指定され、夏休みに他のSSH校と合同で実施されたプログラム。
国際バカロレア(IB)Diplomaプログラムを展開しているGlenunga International High Schoolに滞在し、IB Diplomaの理数系授業を中心に参加することが目的である。
自分は志望動機書を提出し、校内面接を受けて参加した。事前学習として、英語による理数講座や論文作成・データ解析講座を受講した。2週間の研修の中で、アデレードの家庭にホームステイしながら、大学訪問(Flinders University,Adelaide University)、授業体験、Science Fair(National Science Weekイベント)への参加などを経験した。帰国後は、授業レポートと自分で課題を設定する研究レポートを提出した。
参考:小石川のSSH通信

CAS -CAST Academy of Science-(2018)
当時所属していたサークルCASTの4日間にわたる自主イベント。
アクティブラーニングをテーマとし、子供たちにチームで課題に取り組み、実験や発表まで行ってもらった。
課題として、目標に対して方法を選択するものと、目標に対する方法を考えるものの大きく2つを用意した。
自分は工作によるアイスブレイクと、与えられたパーツを組み合わせてからくり装置を完成させる課題をメインで担当した。
Space Robot Contest(2017~2019)
当時アルバイトをしていた子どもの理科離れをなくす会が毎年実施しているロボットコンテスト。
1次予選は全国各地の教室で行われ、2次予選・決勝トーナメントは主に大阪で行われる。
決勝には毎年JAXAの方をお招きしてコメントをいただいている。
自分はその運営の補助や審判、体験企画などを担当した。
参考:webサイト
国内・国際合宿(2017~2019)
当時アルバイトをしていた子どもの理科離れをなくす会が毎年実施している科学合宿。
春と夏に行う国内合宿と、アジアを中心とした複数の国が集まって夏に行う国際合宿がある。
国内合宿では、小中学生を対象にドローンや野外ロボット、Excelでのデータ解析などを教えた。
国際合宿では、ロボットプログラミングの基礎を複数の国の生徒相手に英語で教え、メンターとして文化背景の違う子どもたちと寝食を共にした。
参考:webサイト
Publication
論文など
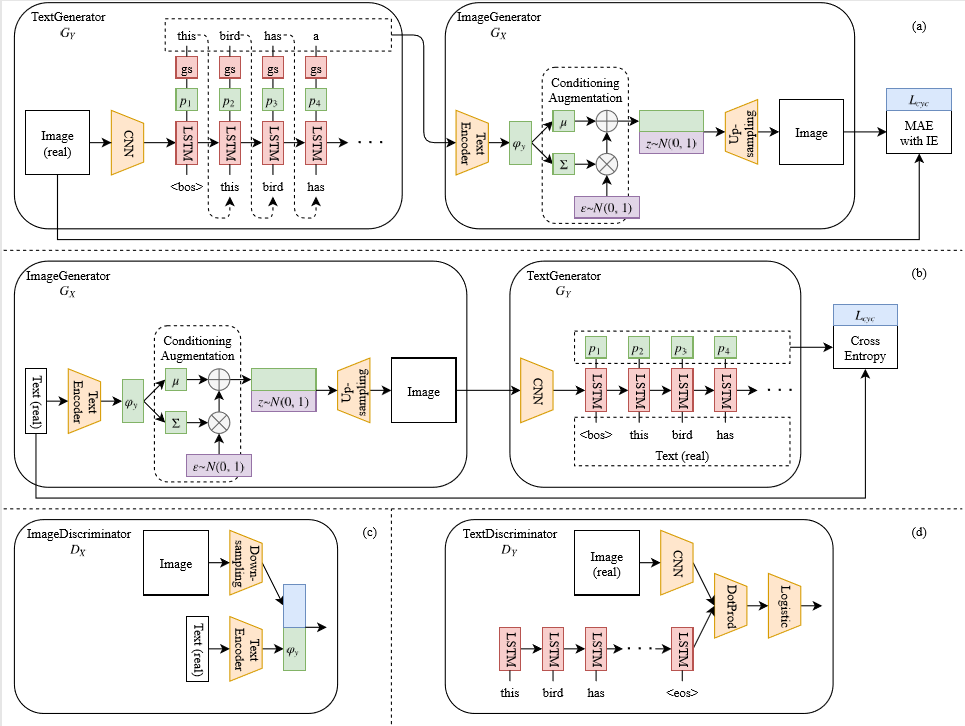
End-to-End Learning Using Cycle Consistency for Image-to-Caption Transformations(2019)
一貫性ロスと微分可能サンプリングの導入によって、画像とキャプションの相互変換を学習させることで、生成されるキャプションの制度を向上させる研究
油圧駆動ソフトフィンガの試作設計と評価(2020)
日本機械学会ロボティクス・メカトロニクス講演会
油圧駆動ソフトグリッパーの開発と把持実験(2020)
第二著者、日本機械学会ロボティクス・メカトロニクス講演会
敵対的生成法を用いた単眼カメラ映像からの人間のモーションキャプチャ(2020)
第二著者、日本機械学会ロボティクス・メカトロニクス講演会
油圧駆動型高出力ソフトロボティクスハンドの開発(2020)
第二著者、第38回日本ロボット学会学術講演会
油圧駆動ソフトハンドの開発と視覚サーボによる制御(2021)
第26回ロボティクスシンポジア
On High Stiffness of Soft Robots for Compatibility of Deformation and Function(2022)
剛性に注目し、柔らかな変形と人間レベルの把持力を両立できるロボットハンドを設計、開発、制御、認識する研究